편마비 환자를 위한 인공지능 기반 보행재활 외골격로봇 중개연구
Transitional research of exoskeleton robot for gait rehabilitation based on AI for hemiplegia patients
연구 목표
연구기간 : 2023.06.28 ~ 2025.11.30 주관부처 : 국립재활원 사업명 : 재활로봇중개연구사업 최근 증가하고 있는 뇌졸중 후 편마비 환자의 지상 보행형 외골격 로봇을 사용한 맞춤형 보행 재활 치료를 위한 인공지능 기술 개발 뇌졸중 후 편마비 환자의 보행 각도 궤적 시계열 데이터로부터 딥러닝 모델을 학습해서 보행 유형을 찾아냄 유형별 특성을 기반으로 지상 보행용 외골격 로봇을 사용한 맞춤형 재활 치료를 위한 프로토콜을 제안함
연구 내용
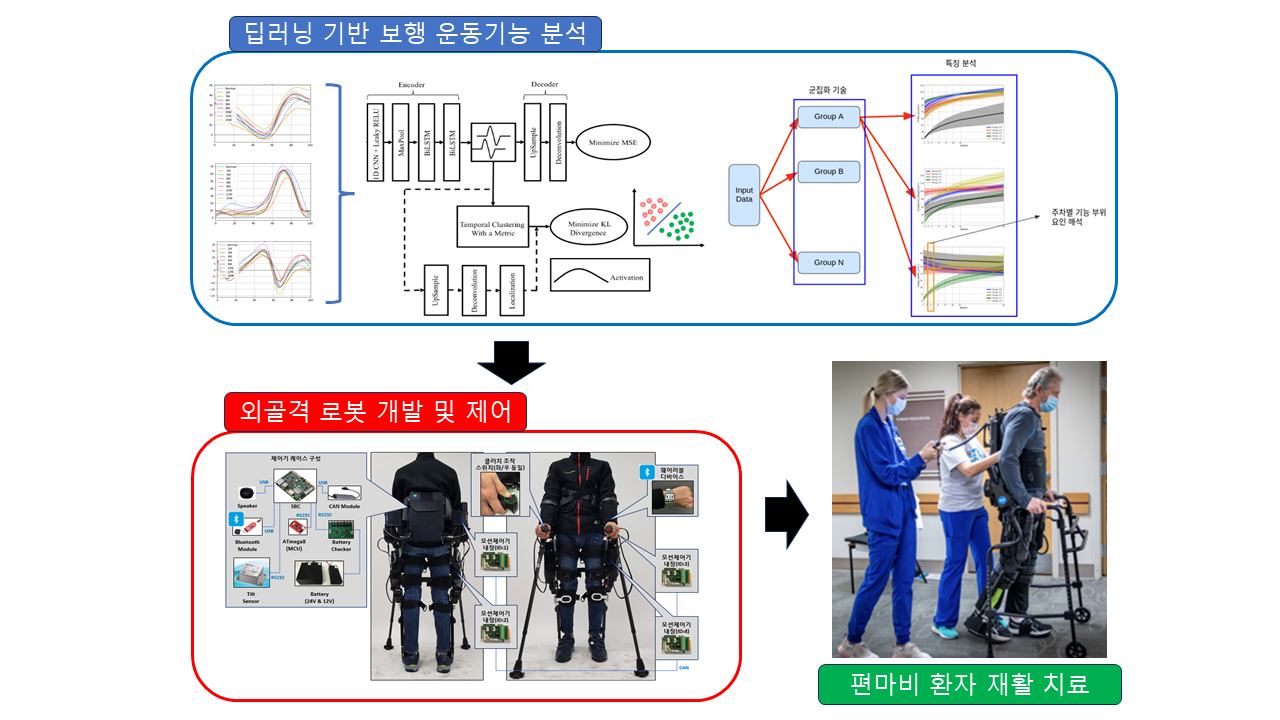
편마비 환자의 환측과 건측을 구분하여 보행 운동기능 빅데이터 저장 및 시각화 운동기능 검사 점수와 보행 주기 등이 포함된 임상 데이터를 빅데이터 서버에 저장 및 시각화 빅데이터를 사용하여 딥러닝 기반 운동학적 보행 유형 분석 기술 개발 정규화 및 텐서 구조화를 활용하여 딥러닝 모델에 입력할 시계열 보행 주기 데이터에 관한 전처리 기술 개발 시계열 데이터를 사용하여 보행 특징 별 군집을 형성하는 딥러닝 네트워크 설계 만성기 데이터를 추가하여 장기적 운동기능 회복 유형 군집화에 최적화된 딥러닝 모델 개발 하지 기능 복원을 위한 맞춤형 재활 치료 프로토콜 개발 및 외골격형 로봇 훈련과의 상관 관계 수립 딥러닝 기반 분석 결과를 바탕으로 편마비 환자별 맞춤형 재활을 위한 치료 전략 개발 장기적 운동기능 회복 군집 유형에 따른 외골격 로봇을 활용한 재활 훈련 프로토콜 고도화
기대 효과
분석된 편마비 환자의 보행 주기 데이터를 활용하여 재활 전문가가 치료를 제공하는데 보조할 수 있음 현재까지 유형화되지 않은 편마비 환자의 회복 유형을 딥러닝을 통해 정량화 시도함으로써 환자 맞춤형 치료를 할 수 있음