장애인·노인의 일상생활에서의 지지 및 보행 보조를 위한 스마트 보조기 제어 AI 개발
Smart Assistive Device Control AI for Supporting Daily Living and Walking Assistance for Persons with Disabilities and the Elderly
연구 목표
기립 동작 및 실내 보행 중 부분적인 보조가 필요한 노인 및 장애인을 대상으로 한 스마트 보조기기 개발 사용자의 보행 특성(보폭, 보행 속도, 균형 유지 능력 등)을 실시간으로 분석할 수 있는 AI 기반 모델 설계 실내 환경에서 수집한 보행 데이터를 기반으로 한 강화학습 기반 제어 전략 수립 사용자 개개인의 신체 능력과 보행 특성에 맞춘 맞춤형 보조기 제어 기술 적용 실제 가정환경에서도 안전하고 효율적인 보행 보조를 실현할 수 있는 시스템 구현
연구 내용
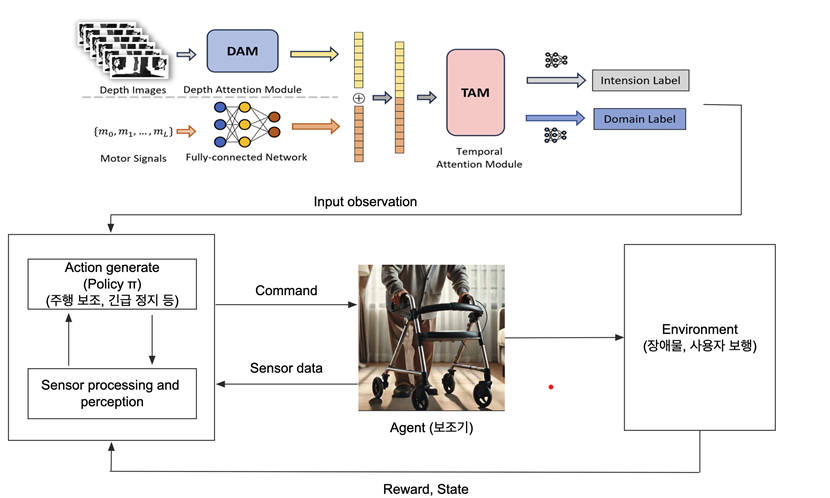
Depth 카메라를 활용하여 사용자의 보행 데이터를 수집하고, 이를 기반으로 보행 특성 및 의도를 분석할 수 있는 AI 모델 구축 사용자 보행 의도를 실시간으로 예측하고, 이를 반영하여 스마트 보조기의 움직임을 제어하는 딥러닝 기반 제어 기술 PoC(Proof of Concept) 개발 보행 의도 예측을 위한 딥러닝 모델의 정확도 및 실시간성 검증을 통해 알고리즘의 신뢰성 확보 사용자 신체 특성과 보행 패턴에 최적화된 맞춤형 강화학습 기반 스마트 보조기 제어 알고리즘 개발 Depth 이미지 기반으로 시간적 패턴을 반영한 Temporal Attention 모델을 활용하여 사용자의 보행 의도(진행 방향)를 실시간으로 파악 시간-공간 패턴 분석 기법을 활용하여 보행 의도 예측 성능을 향상시키는 딥러닝 기반 예측 모델 개발 예측된 보행 의도에 따라 보조기의 제어 방향 및 적절한 이동 속도를 동적으로 생성하는 스마트 제어 알고리즘 구현 Transformer 기반 사용자 의도 인식 결과를 강화학습 에이전트의 상태(state)로 활용하여, 사용자에게 적응하는 보조기 행동 제어 전략 설계 사람과 보조기 간의 상호작용 데이터를 구축하고, 시뮬레이션 환경에서 Sim2Real(가상→현실 전이)을 위한 제어 시나리오 개발 보조기의 이동 궤적 데이터를 바탕으로 사람–보조기 간 상호작용의 잠재 공간(latent space) 특성을 추출하고 분석
기대 효과
실시간 보행 의도 인식 및 상황 적응 제어를 통해 낙상 위험을 감소시키고, 안전한 보행 환경 제공 개인 맞춤형 제어 기능으로 보조기의 종속적 사용이 아닌 능동적 협력 보행을 유도하여 피로도 및 부담 완화 실내외에서의 독립 보행이 가능해짐에 따라 사용자의 자율성과 사회적 활동 참여 기회 증가 실내 환경에 최적화된 보조기 기술을 기반으로, 일반 가정에서도 활용 가능한 차세대 스마트 헬스케어 기기로 보급 기대